
Activity Feed › Discussion Forums › GNSS & Geodesy › WGS vs ITRF
WGS vs ITRF
Posted by geodesist on May 25, 2020 at 8:15 pmDear colleagues
What’s the difference between the ITRF & WGS?
And, when we use the ITRF?
Thank you for your help
bill93 replied 3 years, 10 months ago 10 Members · 19 Replies- 19 Replies

I believe WGS84(week xxx) is IGS at that date. WGS only gets updated at multiple’year intervals.
A point on the ground will have different IGS coordinates as tectonic plates move. In much of the US that is a couple cm per year. That’s why NGS nails their datums to tectonic plates.
The military doesn’t care about centimeter accuracy for many operational purposes. WGS is adequate to park a field shelter or hit a target.
.
This is where the “bookkeeping” part of geodesy kicks in. In short, WGS 84 was developed by the US military to serve their needs. At the same time the US National Geodetic Survey (NGS) in cooperation with other nations developed the North American Datum of 1983. Both efforts were untaken a little too soon. Neither of the original versions included GPS data.
Both original versions of WGS 84 and NAD 83 have undergone updates as more information reflecting better equipment, modeling and data reduction became available. Both original versions have undergone revisions. Both are NOT geocentric; neither had a provision for velocities.
The labeling conventions used for WGS 84 and NAD 83 products must be understood in order to use the products correctly.
After the adoption of the original versions of WGS 84 and NAD 83, international organizations developed their own approaches under the auspices of the International Terrestrial Reference Frame (ITRF). This frame is geocentric at the cm level, includes provisions for velocities. One of its most important products are precise orbits for GPS.
Both the WGS and NAD83 use the ITRF products and frames in their products. The reduction of GPS observations to vectors at the NGS is done with orbit and base station data in ITRF/IGS. As an aside, the ITRF is NOT based on GPS/GNSS data only but includes a multitude of sensors. The frames designated IGS are based on GPS/GNSS data not the other sensors.
As the WGS 84 does not include provisions for velocities, they “redetermine” the positions for their monitoring sites using ITRF data. I believe the current criterion used is to insure the two frames do not differ by more than 5 cm(?).
FWIW, I stopped teaching in 2013 and have not updated the following lecture on ITRF/WGS84/NAD83. See slides 34-50 for information relevant to the poster’s question. It has not been updated to include latest versions of WGS84 and ITRF.
http://geodesyattamucc.pbworks.com/w/file/fetch/64800694/lecture16_2013modernRefFrames.pdf
To answer your question as to whether to use WGS84 or ITRF, it depends. Are you positioning something? In what frame are your reference coordinate for relative positiong? What does your client/agency want as a final product?
For me (in the US) I would use the current version of ITRF for GPS processing and transform results into the current version of NAD83 after an adjustment also in ITRF. The orbits you use in GPS observations should be ITRF (although NGA ,which is responsible for WGS 84, does have an orbit product).
HTH,
DMM
The week number in WGS 84 references is when the update was implemented. The update is done with respect to the current version of ITRF. The update is undertaken when the two frames (WGS 84 and ITRF) diverge beyond a certain level of magnitude either 2 or 5 cm not directly based on the passage of time. See the reference in my other post.
Much NGA data is hard to find. I always have do dig into the site to find GPS-related data. Nowadays, I am mostly concerned with their gravity products and latest EGM 2008. Trying to use and understand this data reminds me of the decline of my faculties …

@geeoddmike Thank you very much for your help

Well done GeeOddMike. A couple of other points. The National Geospatial-Intelliegence Agency (NGA) who are responsible for WGS 84 do not provide any source of high accuracy (cm-level) positioning to the civilian community. I don’t care if someone says they have cm-level WGS 84, it just isn’t available from the source. NGS for example provides both cm-level NAD 83 and ITRF for all of the 2000+ CORS in the network they manage. Additionally high accuracy data in ITRF is available from hundreds of IGS CORS sites around the world. Another issue is that WGS 84 is the default coordinate frame only for the U.S. Navastar Global Positioning System. The EU Galileo, China’s Beidou and Russia’s GLONASS are not defined in WGS 84. I suspect the majority of those engaged in high accuracy positioning are already using multi constellation receivers.
When presented with coordinate data labeled as WGS I am left wondering whether it is from work performed for the NGA or merely a transcription of the labeling used in the processing software.
Here is a screen capture from the iGAGE GNSS processing software manual showing such labeling.
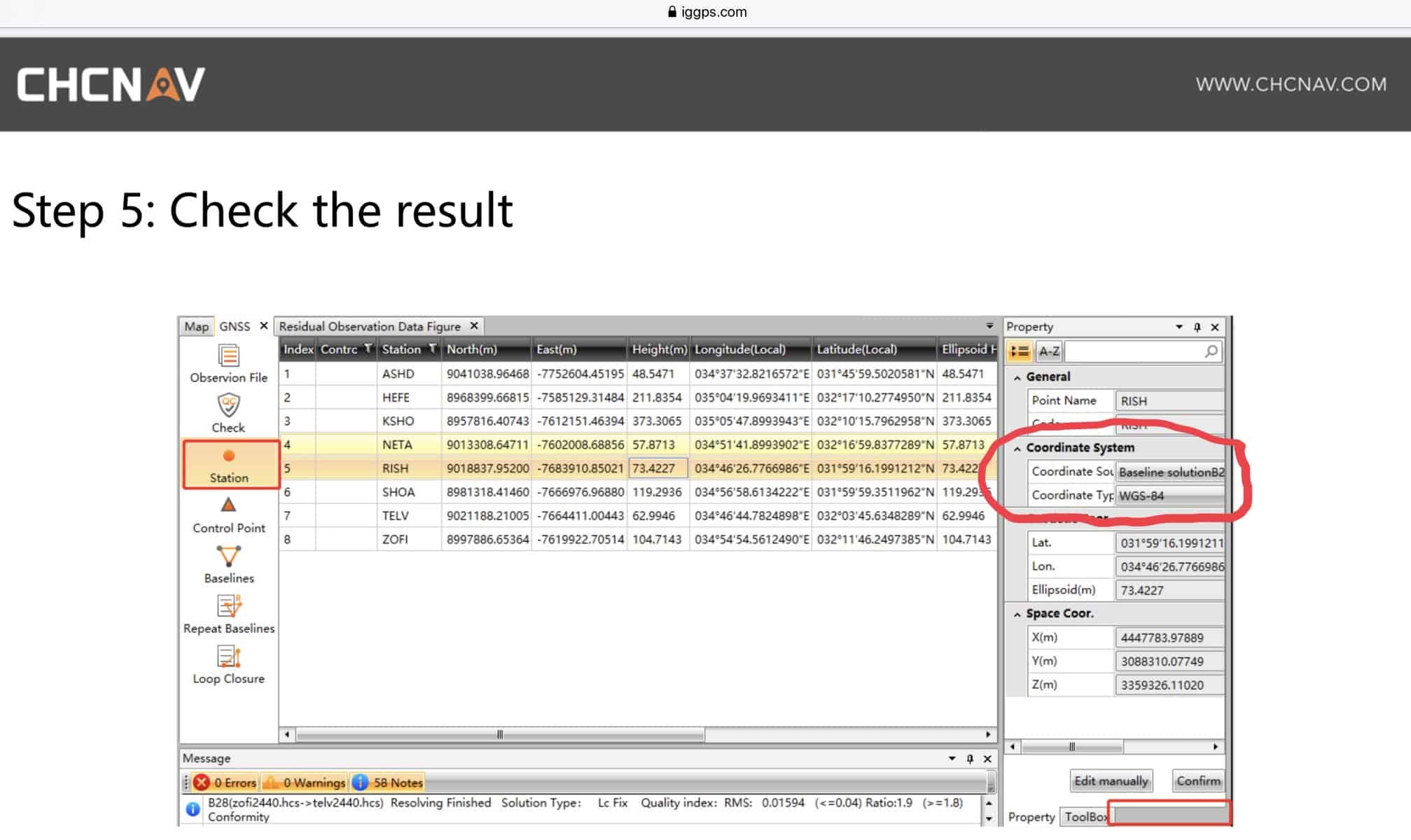
Work intended to provide WGS84 coordinates must use WGS84 coordinates as fixed values. Like NAD83 and ITRF there are different versions of WGS84. They are:
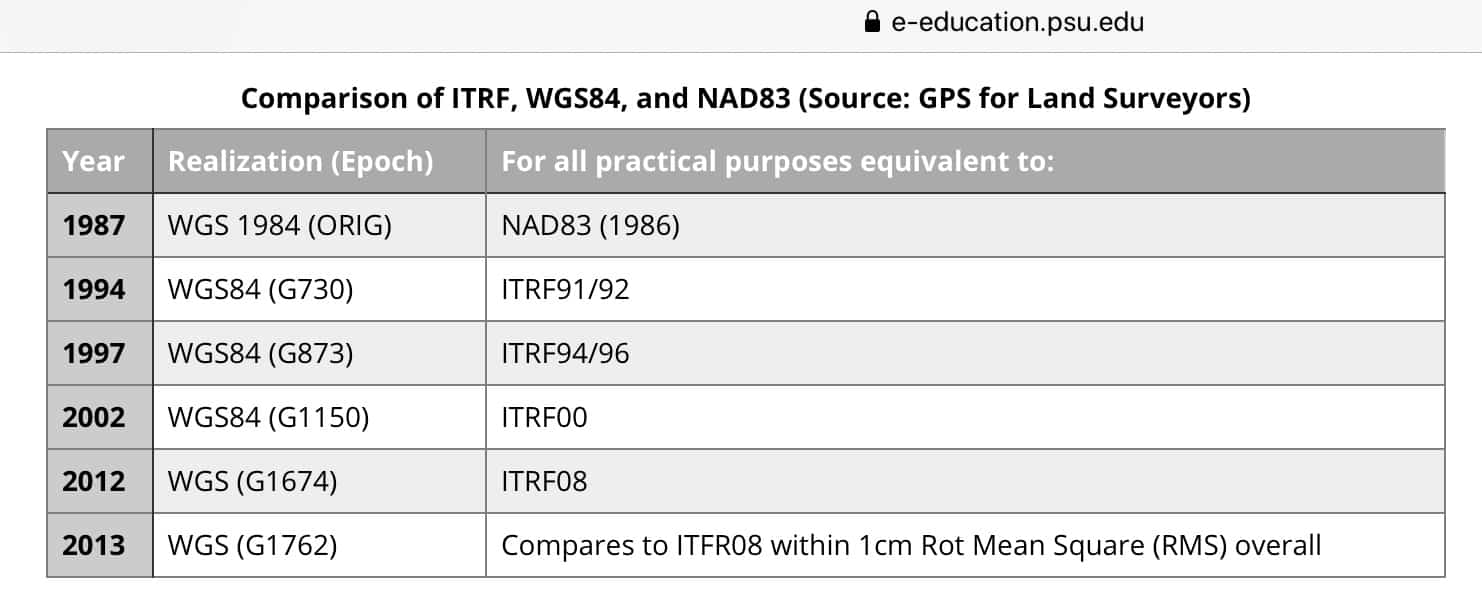
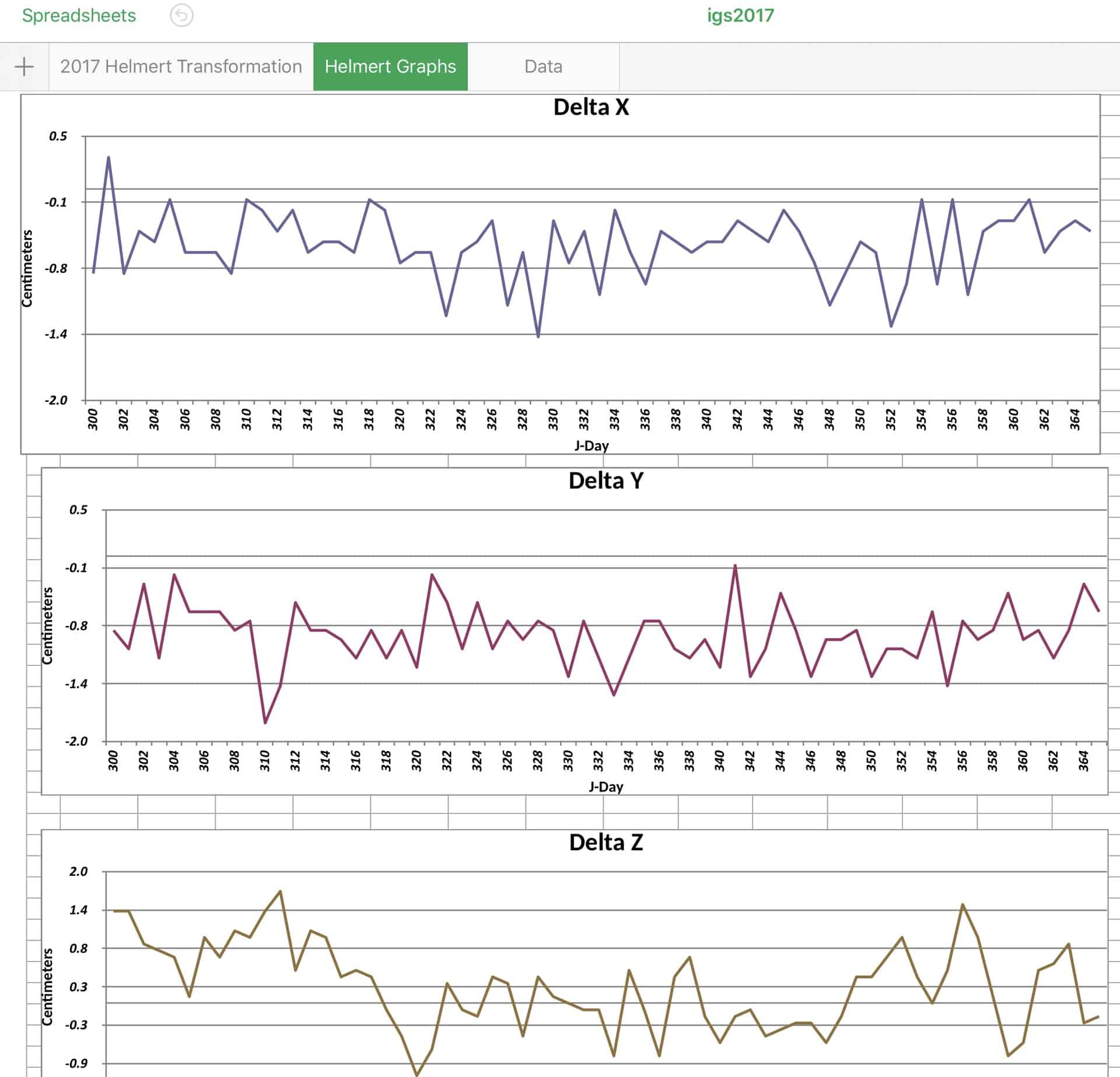
Note that this table links the WGS84 version to an ITRF version. NGA recomputes their WGS84 coordinates to maintain consistency with the current version of ITRF. They monitor the relationship of WGS84 and ITRF on a daily basis computing the Helmert parameters. I cannot find a more recent tabulation than 2017. The plot for this monitoring is shown below:
My personal view is that since GPS week 730 WGS84 can be considered to be equivalent to ITRF at the few cm level. Correct labeling is always important when exchanging or archiving data.
To track how ITRF coordinates have changed with new versions, I include this table of the relationship of ITRF 2014 to previous versions.
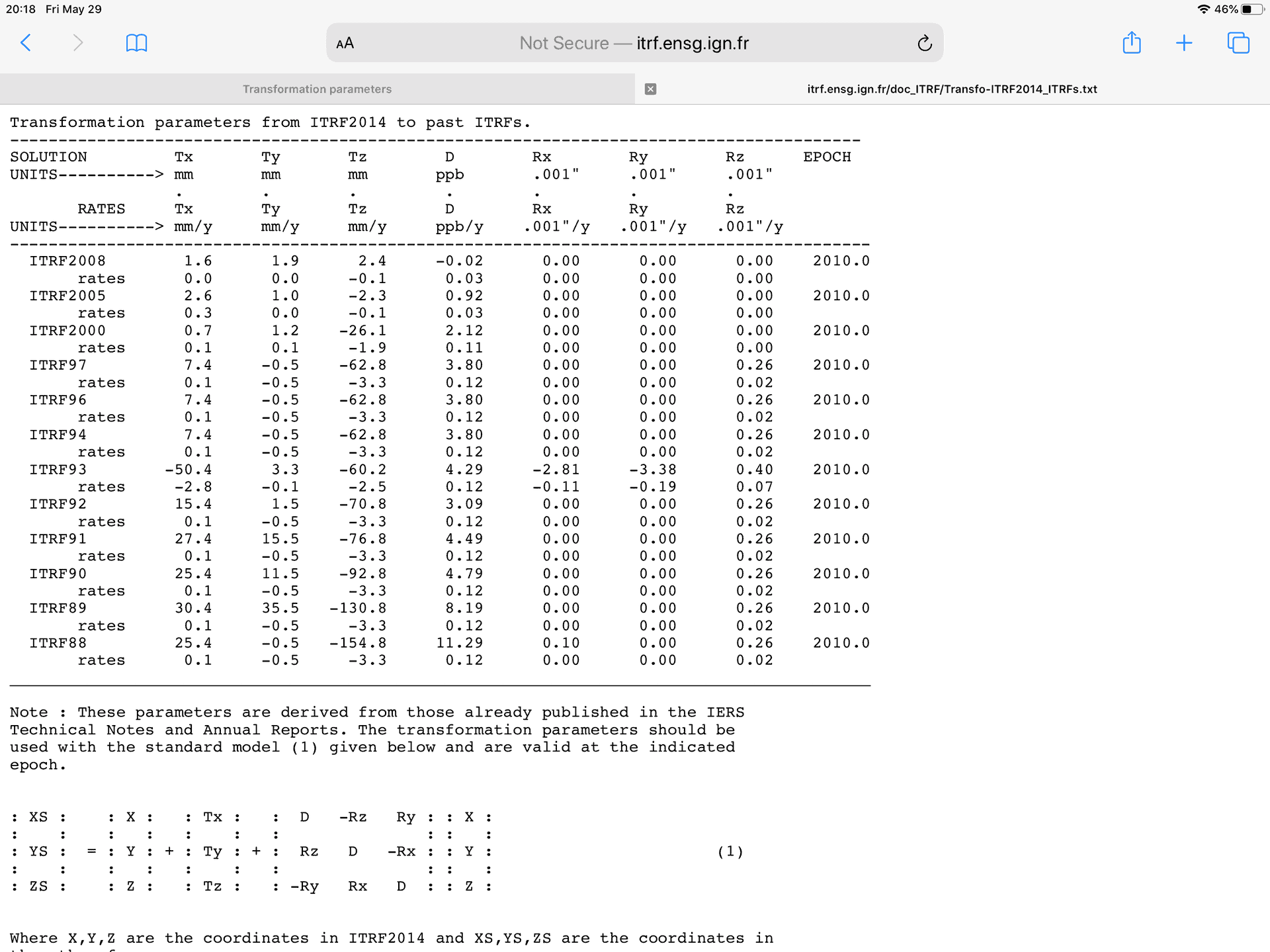
Note that the translations are in millimeters, rotations are in milli-arcseconds and scale are parts-per-billion.
Finally, I include this screen capture of the current NGA Office of Geomatics site including its URL.
One can also obtain NGA precise ephemerides through this page. There are two types, one for SV center of mass the other for the SV phase center.
The adoption of regional implementations of the ITRF like SIRGAS, EUREF, and AFREF makes labeling even more important.

I have found over the years that quite a few software packages ask for “WGS84” coordinates, more common in photogrammetric packages. This is because most photogrammetrists are not geodesists and do not understand the labeling issue. What they really want is a geocentric coordinate in order to minimize any biases in the processing due to being non-geocentric. But it has created a lot of confusion over the years. A big part of my work is photo and lidar control, and a lot of military work. Whenever they ask for “WGS84”, I insist on a clarification…it often turns out they really want NAD83 of some flavor, sometimes at military bases they want NAD83(86) to match some old mapping, but often they (at the particular military base) really don’t know.
I did have a 20 different projects for the same client from 2013 to 2017 where they wanted WGS84(G1150) at epoch 2012.667. You have to be careful when doing something like that because the geoid models are referenced to NAD83 (2011) and so you need to also compute NAD83(2011) coordinates to use in the model.
I’m not sure about the newer Trimble software but Leica and WayPoint still uses WGS84 when they really mean the untransformed reference system vs a possible transformed ‘Local’ geodetic system. I know Trimble did the same thing from the days of ‘TrimVec/TrimNet’ through TGO. I still drives me crazy that it shows up on reports that way. I wish they would stop the practice but I’m afraid that would be like stopping a supertanker with and oar at this point.
As you and other have said, unless you are working for for someone that gives you specific WGS84 values for a specific control point, you are returning WGS84 values to any accuracy.

Great answers here on this. however, the first question that needs to be asked is. Which WGS 84 and ITRF also WGS 84 the reference frame or WGS 84 the ellipsoid. If you would like to truly have WGS 84 positions on the ground you will have to use the correct ephemeris from NGA with raw GPS data to post process and or positioning Absolutely Not relatively. NGS and NGA do work together on many products to review. As well as ITRF. So which epoch which is usually updated every 5 or so years. That new realization of the frame. Also be mindful that WGS 84 Ellipsoid and GRS 80 ellipsoid are very close except in flattening. But they are positioned to center of the earth by current NAD 83 and WGS 84 by about 2 meters. Now take the GRS 80 ellipsoid apply it to the ITRF and its frame and compare to WGS 84 ellipsoid and WGS 84 Reference frame and you have a few centimeters. @Bill make sure if you use the EGM96 or current you apply that GEOID to the correct reference frame…
Welcome to the board OleManRiver.
For those wanting more information about the difference between the GRS80 v WGS84 reference ellipsoid I provide the following links:
https://earth-info.nga.mil/GandG/publications/tr8350.2/tr8350.2-a/Chapter%203.pdf
http://geodesyattamucc.pbworks.com/w/file/87709921/GRS80_defining_parameters.jpg
With respect to the differences in flattening ( a derived constant) I attach the following screen captures from the NGA document TR8350.2 linked above.
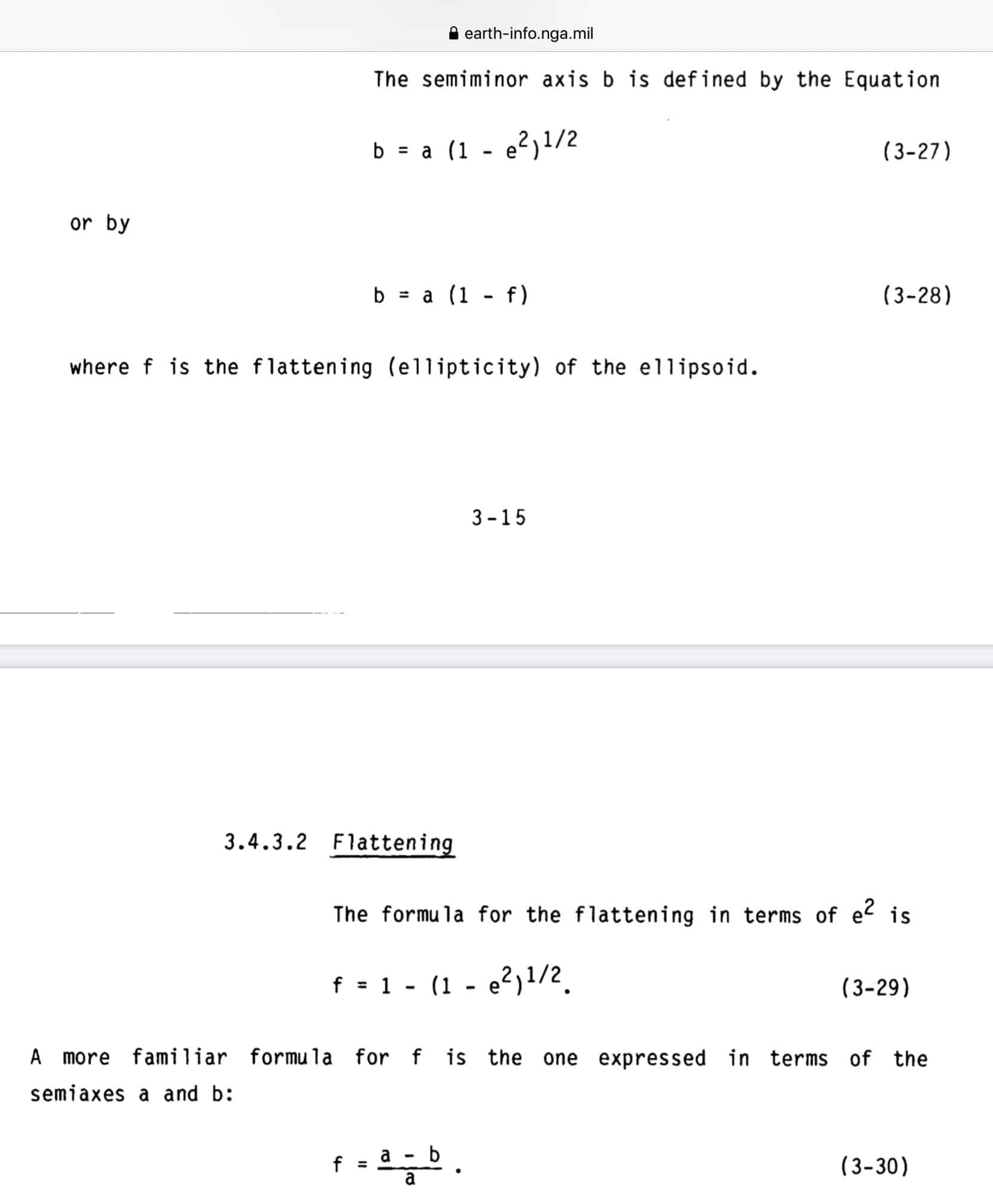

BTW, excuse my notations as I cannot figure how to use subscripts and superscripts in posts.
Note that the the TR document has some nice explanations about the technical issues regarding the choice between J2 (dynamical form factor) and C (normalized 2nd degree zonal gravimetric coefficient). Interesting reading.
Years ago, I did some computations comparing the impact of the difference in flattening between the WGS84 and GRS80 reference ellipsoid. It had no meaningful impact of the surface of the earth. If I get time, I might run the comparisons again.
Note that to correctly derive values for first eccentricity requires use of either J2 or C and not merely the geometric relationship using the semi-major (a) and semi-minor axis (b) values. BTW, former NGS Chief Geodesist Dennis Milbert posted to this board the following value for the first eccentricity (e^2):
e2=6.694380022903415749574948586457761E-0003
Compare this a merely geometric computation based on a and b.
Hope this is useful,
DMM
The missing link:
http://geoweb.mit.edu/~tah/12.221_2005/grs80_corr.pdf – H. Mortiz??s paper on GRS80 posted on Thomas Herring??s site. Unfortunately, my browser has some problems with the PDF formatting.
This link appears correctly formatted: https://ciencias.ulisboa.pt/sites/default/files/fcul/dep/dqb/doc/GRS80_Moritz.pdf
Enjoy,
I would like to bring to your attention 2 things.
1st), the calculation of e^2 for GRS80 ellipsoid by Dr. Dennis Milbert is just a little off in the last 6 digits you show (rounding error in computer).
The value is e^2 (for GRS80 ellipsoid) 0.006694380022903415749574948586 289306 212443890… ; where the 1st separation gives the
correct last 6 digits you posted and then the 2nd separation is some added digits by me just for heck of it.
2nd), you state “ Note that to correctly derive values for the first eccentricity requires use of either J2 or C…”
This is not quite correct. Some ellipsoids hold different parameters such as Clarke 1866 which held “a” (the semi-major axis and “b” the semi-minor axis) and you then calculated other parameters such as 1/f etc.. Clarke 1866 ellipsoid a= 6378206.4m and b= 6356583.8m ;
see TM 5-237 Surveying Computer’s Manual, Oct. 1964 page 449
GRS 80 ellipsoid a= 6378137 m (held as being exact) then b can be calculated as = 6356752.314140347438388617046822244…
JOHN NOLTON
My overlong responses on this issue where attempts to highlight the fact that the defining parameters of both the WGS84 and GRS80 ellipsoids use only one geometric quantity (a), Earth’s gravity (GM), gravity coefficient (C for WGS84 and J2 for GRS80) and the earth’s rotation rate (lower case omega).
Other quantities are derived from these values. As the two documents linked in previous posts show, computation of these derived values is rather complicated.
You can challenge the calculation of former NGS Chief Geodesist Dennis Milbert (I need to check his old post to make sure I did not make a transcription error as well as his discussion of his method of performing this calculation) you do not detail how you performed yours.
No offense intended. I confess that I have not attempted to replicate the computation using the referenced documents.
I am having compatibility issues between my Mac OS version and my version of Matlab. It has been a while since I did any coding in C much less FORTRAN.
As for the Army TM, I thought these were mostly intended to standardize processing procedures often specifying specific values for parameters used in the computations (C&GS manuals were likewise designed).
I remember someone stating that the Army manuals specified a value for pi to guarantee that the use of different capability tools did not yield different results.
As a practical matter, if I had to do any computations using the WGS 84 reference ellipsoid I would use their tabulation of derived values.
Once again, I go on too long.

It was always my understanding that WGS84 is proprietary (high accuracy) and available to the government or DOD only,,,,,,,,, or something.
However, programs such as Trimble would list WGS84 as the coordinate basis in the software so users believed they were on WGS84 coordinates.
If you look at TBC today it will list the coordinate for the base coordinate as Global Coordinate.
For me that would be NAD83 because those are the coordinate I imput into the file to use as a basis.
The software does what you tell it to do, if you imput ITRF coordinates then your Global Coordinate is ITRF which is an easier get than WGS84.
- Posted by: @mightymoe
It was always my understanding that WGS84 is proprietary (high accuracy) and available to the government or DOD only,,,,,,,,, or something.
You can get ITRF and transform with reasonable accuracy to WGS84(xxxx), and that will be a small difference.
What is available only to authorized users is the P code which allows very rapid very accurate positioning. Some survey equipment uses the transitions of the bits in the P (also called Y) code, sort of like the old squaring receivers, but not the code itself so needs more averaging to get accuracy.
. 
@bill93 A clarification (I’m sure bill93 knows this and was just simplifying): “Y-code” is not a synonym for “P-code”. P-code is the publicly known precision code, and Y-code is the combination of P-code with the secret W-code. Y-code is the encrypted version of the P-code, and only one or the other is transmitted. I believe that P-code has not been transmitted since 1994, the year that anti-spoofing mode (A/S mode) was activated more-or-less permanently; maybe there have been some brief periods of A/S mode deactivation since 1994. There had been testing of A/S mode prior to 1994.
Some quick additional info for those interested:
The Y-code (or the P-code when A/S mode is not activated) is modulated onto both the L1 and L2 carriers, but the C/A-code (coarse/acquisition code) is modulated onto only the L1 carrier. The public knowledge of the C/A-code makes it easy to recover the L1 carrier, but the lack of public knowledge of the W-code and hence the Y-code precludes ordinary users, when A/S mode is activated, from directly using a code to recover the L2 carrier for dual-frequency processing.
There are several methods for recovering the L2 carrier even when A/S mode is activated. Squaring is the oldest and least-desirable method. For explanations of various methods, see:
Pages 14 – 16 of Thomas Herring’s “Principles of the Global Positioning System, Lecture 07” (a nice, brief overview): https://ocw.mit.edu/courses/earth-atmospheric-and-planetary-sciences/12-540-principles-of-the-global-positioning-system-spring-2012/lecture-notes/MIT12_540S12_lec7.pdf
“Optimum Semi-Codeless Carrier Phase Tracking of L2” by K. T. Woo: http://www.bmotion.com/navcom/images/tech_archiv/L2_Phase_Tracking.pdf
By the way, the whole picture has been or will be affected by the later additions (some very long in coming) of the L2C code, the M-code, and the L5 carrier. And, the corresponding considerations for other systems in the GNSS world is a whole other set of stories.
- Posted by: @bill-c
P-code is the publicly known precision code, and Y-code is the combination of P-code with the secret W-code. Y-code is the encrypted version of the P-code, and only one or the other is transmitted.
I knew the basic facts, but forgot which was P and which was Y, and didn’t bother to look it up. ❗ Most times in equipment or RINEX you see it referred to as P, regardless of which is actually sent. I also did not know the rate of the W code, which, as the linked paper says, since it is so slow provides a great opportunity to improve performance without knowing the code. You can know and average over pieces of the Y within a sign flip and that helps dig through the noise.
.







Log in to reply.